



.jpg?crc=530052058)
.jpg?crc=3808975229)

o projekcie

FUMAR to projekt budowy analoga łazika marsjańskiego na potrzeby międzynarodowych zawodów European Rover Challenge. Załoga koła naukowego Fupla wraz z robotem FUMAR bierze udział już od pierwszej edycji zmagań.
założenia projektu
Podczas budowania robota kierujemy się przede wszystkim:
- chęcią stworzenia urządzenia niezawodnego oraz spełniającego wszystkie postawione wymagania
- wolą zapewnienia modułowości układu sterowania i redundancyjności systemu komunikacyjnego
- potrzebą zapewnienia bezpieczeństwa dla urządzenia oraz przebywających w jego bliskości osób
- zamiłowaniem do wdrażania rozwiązań innowacyjnych
- koniecznością stworzenia projektu niskobudżetowego dzięki racjonalnemu zarządzaniu funduszami
Założenia dotyczące mechaniki urządzenia:
- podwozie robota powinno być zdolne do jazdy w zróżnicowanym i trudnym terenie
- łazik powinien posiadać lekką lecz wytrzymałą i sztywną konstrukcję
- wyposażenie łazika powinno zawierać precyzyjny manipulator
- manipulator powinien mieć zapewniony pełen zakres ruchu w przestrzeni roboczej poprzez zbudowanie ramienia o 6 stopniach swobody
- robot powinien posiadać wiertnicę do pobierania próbek gleby
- urządzenie powinno być łatwe w serwisowaniu i rozbudowie
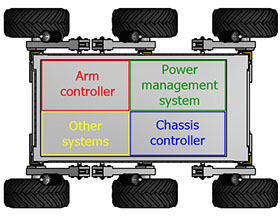
Założenia dotyczące układu sterowania:
- układ sterowania powinien posiadać budowę modułową co zmniejsza ryzyko całkowitego unieruchomienia całego pojazdu w przypadku awarii
- system komunikacji z łazikiem powinien uwzględniać kilka kanałów przesyłanych danych działających jednocześnie
- system komunikacji pokładowej robota powinien być zbudowany w oparciu o niezawodną sieć Ethernet i nowoczesny protokołu MQTT
- prądy płynące w każdym z napędów robota powinny być mierzone i ograniczane w razie konieczności
- położenie manipulatora powinno być wyznaczane dzięki pomiarom za pomocą enkoderów magnetycznych
- sterowanie manipulatorem powinno odbywać się poprzez zastosowanie prostego i odwrotnego zadania kinematyki
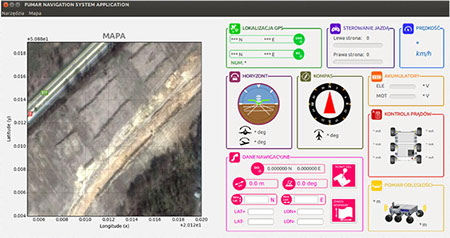
- pozycja i orientacja pojazdu powinna być określana za pomocą szeregu czujników oraz systemu wizyjnego
- łazik powinien zawierać system wizyjny służący do zdalnej kontroli stanu łazika a także dostarczający danych dla oprogramowania sterującego
- robot powinien posiadać możliwość zdalnego wyłączenia i włączenia każdego z modułów wewnętrznych
- układ zasilania powinien być wyposażony w bezpieczniki oraz łatwo dostępny wyłącznik bezpieczeństwa
realizacja
W chwili obecnej budowany robot realizuje większość z postawionych założeń. Łazik jest już dostosowany do odczytywania większości zaplanowanych wielkości mierzonych, takich jak prądy napędów, położenia wałów napędów czy orientacja robota w przestrzeni i przebyta przez niego droga. Wykonano odrębne moduły sterowania podzespołami oparte na mikrokontrolerach ARM firmy Texas Instruments oraz minikomputer Raspberry Pi. Wszystkie wewnętrzne elementy sterujące łazika dostosowano do komunikacji w sieci Ethernet za pomocą protokołu MQTT.
Zespół prowadzi także proces przebudowy części mechanicznej robota. Usztywniane są elementy manipulatora, rozszerzany jest jego zakres ruchu poprzez wykonanie dodatkowego stopnia swobody, natomiast baza wymiennych chwytaków ulega rozbudowaniu. Zespół planuje wykonać także dodatkowy, niezależny od głównego manipulatora moduł, służący do wiercenia w podłożu.
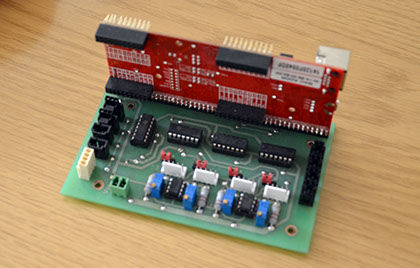
Prace nadal jednak trwają. Układ elektryczny robota jest w trakcie rozbudowy do nowszej, udoskonalonej wersji. Obecnie wprowadzany jest także plan zapewnienia redundancyjności komunikacji z łazikiem. Udoskonalane są programy komputerowe uruchamiane w stacji kontroli, które są odpowiedzialne za sterowanie modułami oraz algorytmy sterowania i pracy półautomatycznej.


historia

IV 2014
Decyzja o rozpoczęciu budowy robota Fumar
5-7 IX 2014
Udział w European Rover Challenge 2014 zakończony zdobyciem 5 miejsca na 9 startujących zespołów
16 V 2015
Pokaz łazika w galerii Korona Kielce "Politechnika miastu"
29 VIII 2015
Pokaz łazika w galerii Echo Kielce "Łaziki i Torciki - Kosmiczne Urodziny Galerii Echo"
4-6 IX 2015
Udział w European Rover Challenge 2015 zakończony zdobyciem 8 miejsca na 29 startujących zespołów
9.XI.2015
Udział w programie telewizyjnym "Szkiełko i oko"
10.V.2016
Udział w konferencji "Innowacyjne podejście do tworzenia relacji - Studenci firmom"
15 V 2016
Pokaz łazika w galerii Korona Kielce "Politechnika miastu"
14-16 IX 2018
Udział w European Rover Challenge 2018 zakończony zdobyciem 22 miejsca na 35 startujących zespołów

