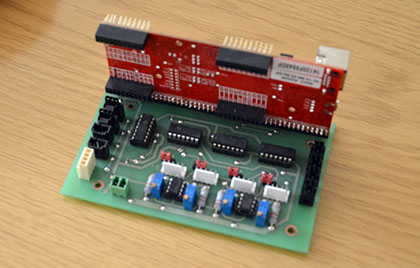
Elektronika & PCB
Systemy wbudowane (ARM, AVR) i projektowanie PCB
Zadaniem Koła Naukowego Fupla jest umożliwienie studentom rozwijania się w dziedzinach automatyki, robotyki, elektroniki i informatyki poprzez łączenie teorii i praktyki z pasją! Czym się zajmujemy?
Systemy wbudowane (ARM, AVR) i projektowanie PCB
Sieci neuronowe i przetwarzanie obrazu
Modelowanie CAD i prototypowanie mechaniczne
Algorytmy sterowania, ROS i oprogramowanie
Projektowanie konstrukcji i platform mobilnych
Social media, eventy i współpraca z partnerami
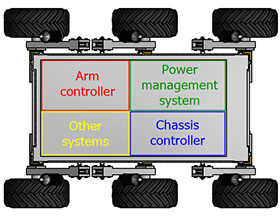
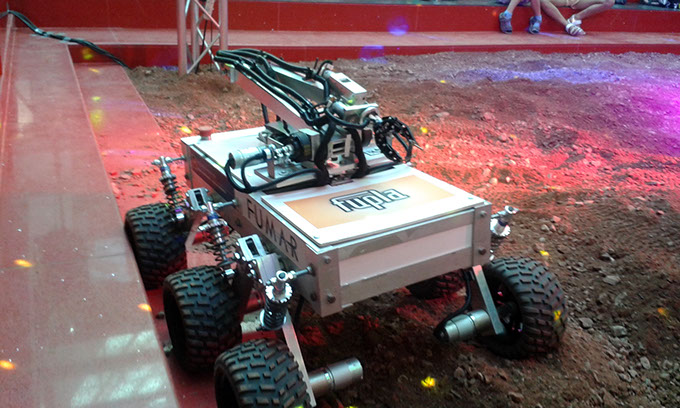
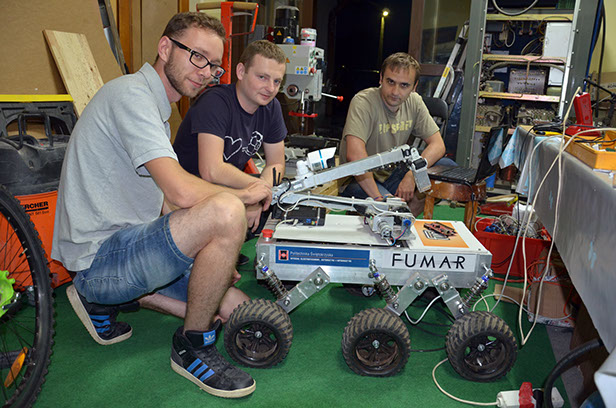
Projekt FUMAR powstał z zamiłowania do innowacji i potrzeby stworzenia niezawodnego urządzenia opartego na racjonalnym budżecie. Kluczowym założeniem była modułowość oraz bezpieczeństwo – zarówno systemu, jak i otoczenia.
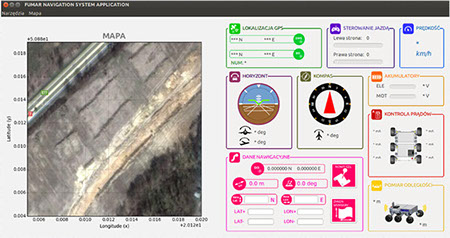
W toku realizacji udało się wdrożyć zaawansowaną komunikację opartą na sieci Ethernet i protokole MQTT, co pozwoliło na stabilną kontrolę nad każdym podzespołem łazika.
Decyzja o rozpoczęciu budowy robota Fumar.
Udział w European Rover Challenge 2014 zakończony zdobyciem 5 miejsca na 9 startujących zespołów.
Pokaz łazika w galerii Korona Kielce „Politechnika miastu”.
Pokaz łazika w galerii Echo Kielce „Łaziki i Torciki — Kosmiczne Urodziny Galerii Echo”.
Udział w European Rover Challenge 2015 zakończony zdobyciem 8 miejsca na 29 startujących zespołów.
Udział w programie telewizyjnym „Szkiełko i oko”.
Udział w konferencji „Innowacyjne podejście do tworzenia relacji — Studenci firmom”.
Pokaz łazika w galerii Korona Kielce „Politechnika miastu”.
Udział w European Rover Challenge 2018 zakończony zdobyciem 22 miejsca na 35 startujących zespołów.








Wydział Elektrotechniki, Automatyki i Informatyki
Politechnika Świętokrzyska
Al. Tysiąclecia Państwa Polskiego 7
25-314 Kielce